고속 역제곱근과 그 후 구현체들
예전에도 fast inverse square root알고리즘을 본 적이 있지만, 그 때는 그저 '오-신기하네' 하고 넘어갔던 기억이 있다. 문득 갑자기 거기에 생각이 미쳐 이해해보려 했으나, 위키피디아의 문서가 살짝 부실해서 개인적으로 직접 유도해보았고, 그 김에 궁금증이 생겨서 모던 방법론까지 찾아보았다. 이 포스팅은 그에 대한 정리다.
이 포스트에선 위키피디아보단 조금 더 친절하게 유도해준다. 그러나 실행 시간 및 명령어 셋에 대한 상세한 정보를 담진 않았고, 그에 대한 자세하고 좋은 포스팅을 발견했기 때문에(특히 어떤 컴파일 플래그를 사용했을 때 어떻게 달라지는지에 대해 아주 상세한 보고를 담고 있었다.) 이에 링크를 건다.
Revisiting The Fast Inverse Square Root - Is It Still Useful?
Fast Invese square root
Intro
이미 너무 잘 알려진 일화지만, 여기에 간략히 설명을 해보겠다. 렌더링을 할 때엔 광원 계산등에서 normal을 필요로 한다. 이 때 이 normal은 크기가 1을 가지도록 정규화 되어야 하기 때문에, 제곱근의 역수를 아주 자주 계산해야했다. 이런 와중, 퀘이크 3 아레나에서 이를 해결하기 위해 Fast inverse square root라는 신기한 알고리즘을 가져왔다. 이후 공개되어 아주 유명해졌는데, 골때리는 주석과 선뜻 이해하기 힘든 로직이 이 유명세의 백미이다.
c와 친하지 않은 분들을 위해 설명하자면,(뒤쪽 iteration 부분은 빼고)
- float 를 integer취급한다.(비트는 그대로인 채)
- magic number에서 integer 취급한 float를 뺀다.
- 다시 float취급한다.
- 이제 원래 float의 제곱근의 역수가 되었다.(?)
원본 소스코드는 다음과 같다.
float Q_rsqrt( float number )
{
long i;
float x2, y;
const float threehalfs = 1.5F;
x2 = number * 0.5F;
y = number;
i = * ( long * ) &y; // evil floating point bit level hacking
i = 0x5f3759df - ( i >> 1 ); // what the fuck?
y = * ( float * ) &i;
y = y * ( threehalfs - ( x2 * y * y ) ); // 1st iteration
// y = y * ( threehalfs - ( x2 * y * y ) ); // 2nd iteration, this can be removed
return y;
}
여기서 핵심은 다음 두 가지이다.
- 수학적으로 integer와 float를 옮겨타는게 어떤 뜻을 의미하는가?
- iteration은 어떤 의미를 갖는가?
두 번째는 어떤 의미로는 trivial 하지만, numerical optimization과 친하지 않다면 어려울 것이므로 같이 풀어보자.
Delving into float and int
여기서 핵심은 float representation이다.

IEEE 754의 32비트 부동소수점 데이터 포맷에 따르면 float는 위 구조를 가지고 있다.
- Sign(1bit) $s$: 양수/음수
- Exponent(8bit) $e$: 2의 지수부. 127의 offset을 갖는다.
- fraction(23bit) $f$: msb부터 $2^{-1}, 2^{-2}, \cdots, 2^{-23}$
이에 대해 지수부와 가수부의 비트를 integer로 생각하고 각각 나타내는 숫자가 $e$와 $f$라고 해보자. fraction 파트가 나타내는 바는 결국 정수형과 같지만 $2^{-23}$을 곱했을 뿐이다. float representation은 다음과 같아진다.
$$ float \to {(-1)}^s \cdot 2^{(e-127)} \cdot (1+2^{-23}f) $$반면 같은 비트가 integer를 의미할 때는 다음과 같다. (sign은 생략.)
$$ int \to 2^{23}e + f $$여기서 다음 성질이 있다.
- floating point representation에서, 가수부 $(1+2^{-23}f)$ 는 $[1.0~2.0)$이다.
- integer representation이 되면서, 2의 지수 $e$ 가 실수부로 내려왔다.
2번에 의해서, float가 int로 변환된다는 것은 scale과 임의의 offset $\alpha$ 를 가진 다음 변환이 된다.
$$ f_{float \to int}(y) : 2^{23} \log_2 y + \alpha $$그리고 log는 지수부를 단순 사칙연산으로 바꿀 수 있다는 특징이 있다. 따라서 $-{1\over2} \log_2 y$ 를 다시 exponent로 바꾸면, $y^{(-1/2)}= {1\over \sqrt{y}}$ 가 된다.
Approximating
여기서 식을 조금 더 develop한다면,
$$ f_{float \to int}(y) = 2^{23} (e-127 + \log_2(1+2^{-23}f) ) + \alpha $$이 된다. 여기서 $\log_2 (1+2^{-23}f)$ 은 $[0,1)$이기 때문에, $\log_2(1+x) \approx x + c$ 로 근사 가능하다. (여기서 $c$는 error compensation term.)
따라서,
$$ \begin{align*} f_{float \to int}(y) &= 2^{23} e + f \newline &\approx 2^{23} (e-127 + 2^{-23}f + c ) + \alpha \newline &\approx 2^{23} e + f + 2^{23}(c - 127) + \alpha \newline \end{align*} $$에서,
$$ \alpha \approx 2^{23} (127-c) $$$$ f_{float \to int}(y) : 2^{23} (\log_2 y + 127 - c) $$가 된다.
Compensating the bias
이제 integer에서 -1/2를 곱한다고 생각해보자.
$$ -{1\over2}2^{23} (\log_2 y + 127 - c) = 2^{23} (\log_2 y^{-{1\over2}} - {1\over2} (127 - c) ) $$그런데 우리는 다시 float로 바꾸기 전에, 우측의 상수 term$(127 - c)$은 다시 원래 모양을 찾길 바란다. 따라서 다음 상수를 더해준다.
$$ 2^{23} (\log_2 y^{-{1\over2}} - {1\over2} (127 - c) ) + 2^{23}({3\over2}(127-c)) \newline = 2^{23} (\log_2 y^{-{1\over2}} + 127 - c) $$이제 다시 float로 변환하면 inverse square root가 된다.
여기서 상수 $2^{23}({3\over2}(127-c))$ 를 구해보자. 위에서 그림을 그릴 때 사용했던 상수는 0.0450465이다. (이 상수는 원본의 magic number를 재생산 하기 위한 숫자이다.Chris Lomont는 최적의 상수 0.432744889959443195468521587014를 구해내었다.)
또, integer는 bit >> 연산으로 오른쪽으로 한 비트 미는 것으로 1/2을 얻을 수 있다. 따라서 -1/2를 곱하고, 보정하기 위한 상수를 더하는 과정을 코드로 표현하면 다음과 같다.
i = 0x5f3759df - ( i >> 1 );
Newton-Raphson Method

Newton’s method라고 불리는 이 방식은 정확한 해를 모를 때 derivative와 접선의 x절편을 이용하여 수치해를 찾아내는 방법으로, 식으로 나타내자면 다음과 같다.
$$ x_{n+1}=x_n - {{f(x_n)}\over{f'(x_n)}} $$여기서 우리가 원하는 제곱근의 역수를 이 식으로 나타내기 위해 $f(x) = 0$ 꼴로 만들자.
$$ y={1\over \sqrt x} \newline y^{-2}-x=0 = f(y) $$우리가 구해야하는 해는 $y$이고 , 입력 $x$는 이 시점에서 상수와 같다. Newton’s method를 적용시켜보면,
$$ \begin{align*} y_{n+1} &=y_{n} - {{y_n^{-2}}-x\over -2y_n^{-3}} \newline &=y_{n} + y_n({1\over2} - {1\over2} x y_n^2) \newline &=y_n({3\over2} - {1\over2} x y_n^2) \end{align*} $$이를 코드로 나타내보자.
const float threehalfs = 1.5F;
x2 = number * 0.5F;
y = y * ( threehalfs - ( x2 * y * y ) );
이것으로 모든 방법이 풀렸다.
float Q_rsqrt( float number )
{
long i;
float x2, y;
const float threehalfs = 1.5F;
x2 = number * 0.5F;
y = number;
// log_2 를 적용
i = * ( long * ) &y;
// -0.5를 곱하고, 지수부의 bias 및 기타 근사화 수치를 보정
i = 0x5f3759df - ( i >> 1 );
// 다시 float 형식으로 변환
y = * ( float * ) &i;
// newton's method
y = y * ( threehalfs - ( x2 * y * y ) ); // 1st iteration
// y = y * ( threehalfs - ( x2 * y * y ) ); // 2nd iteration, this can be removed
return y;
}
square root 명령어
Basic instruction sets
| Instruction set | $\sqrt x$ | ${1\over{\sqrt x}}$ |
|---|---|---|
| x87 | fsqrt | |
| 3DNow! | pfrsqrt | |
| SSE | sqrtps, sqrtss | rsqrtps, rsqrtss |
| SSE2 | sqrtpd, sqrtsd | |
| AVX | vsqrtps, vsqrtpd,vsqrtsd,vsqrtss | vrsqrtps,vrsqrtss |
| AVX-512 | vsqrtps zmm etc. | vrsqrt14ps etc. |
AVX부터는 종류가 많다. 이 중 fsqrt는 잘 사용되지 않으며, AMD 3DNow!도 deprecated되었다. 해석하는 법을 첨언하자면 다음과 같다.
sqrt: 당연히 제곱근을 의미한다.rsqrt: reciprocal of square root. 제곱근 역수.s/p: scalar/packed. SIMD명령어에서 여러 데이터를 동시에 처리한다.s/d: single precision / double precisionv: vectored extenson. 3-operand등의 방식을 사용 가능하다. (src/dst등이 더 자유로움)zmm: name of register14: 근사 계산의 precision.14는 14-bit accurate.
예를들어, vrsqrt14ps 같은 경우는 packed single precision 데이터에 대해 제곱근의 역수를 계산하며, $2^{-14}$의 상대 오차를 보장한다는 뜻이다.
So how does this work?
우선 3DNow! 시절 알고리즘을 보면 다음과같다. b가 제곱근을 구할 대상이며, X3 가 reciprocal of square root가 된다.
X0 = PFRSQRT(b) // Packed float reciprocal of square root
X1 = PFMUL(X0, X0) // packed float multiplication
X2 = PFRSQIT1(b, X1) // packed float reciprocal of square root iteration#1
X3 = PFRCPIT2(X2, X0) // packed float reciprocal iteration#2

이에 대해 PFRSQRT 는 15비트까지 accurate하며, PFRSQIT1 를 이용해 iteration을 하고, 역수를 계산하기 위한 iteration 명령어인 PFRCPIT1과 PFRCPIT2 중 PFRCPIT2 명령어를 재사용하여 24비트 정확도를 얻어낸다고 되어있다. 여기 technical manual에서 명시적으로 위의 bit-level hacking과 동일한 구조의 Newton-Rhapson method에 대해 발언한다.
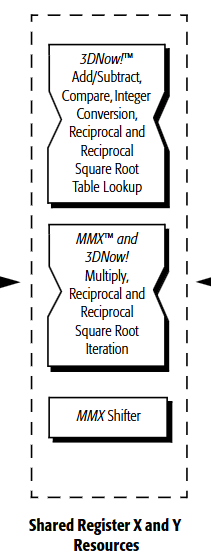
정밀도를 얻어내는 과정이야 이제 Newton-Rhapson method인 듯하나, 최초 근사의 경우 이런 bit-level hacking을 사용하진 않는 듯 보인다. 비록 명령어셋까지 정의한 시점에서 그 아래 레이어의 구현체는 하드웨어 제조사의 마음이며, 아키텍쳐에 따라서도 variation이 있을 것이다. 다만 이 문서에는 명시적으로 Square Root Table Lookup이라고 되어있다.
floating point의 데이터는 exponent/mantissa 의 분리가 가능한데, 이렇게 분리한 후 exponent의 일부와 mantissa의 데이터를 상위 n비트를 이용하여 lookup table을 이용하여 빠른 속도로 근사하는 것으로 보이며, 이 안에서 dedicated된 몇 iteration을 돌거나 그대로 나오는 것으로 보인다. 결국은 memory<->속도 사이의 trade-off를 나름대로 조절하여 15비트 수준의 정밀도를 내보내는 것으로 보인다.
Modern instruction choices
sqrt 방법은 근사치라고 되어있지 않은데에 반해, rsqrt reciprocal의 경우 근사치라고 명시되어있다. 여기서 근사치와 근사치가 아님의 기준은 $\pm0.5 \mathrm{ulp}$ 인데, ulp는 unit of least precision으로 lsb에 대한 상대 단위를 나타낸다. 이 단위의 0.5 이하로 오차가 들어온다면 이 bit representation으로 표시 불가능한 차이이기 때문에, 오차가 이 값 아래로 들어온다면 근사치가 아니다라고 말할 수 있다.
재미있게도 3DNow!의 경우엔 fsqrt 를 구할 때 rsqrt 후 RFRCPIT2 를 거쳐 원본 데이터와 곱해주어 제곱근을 얻어내는 선택지를 골랐는데, 이후엔 sqrtss 명령어 쪽이 조금 더 dedicated 되어 rsqrt를 사용하는 데에 쓰도록 바뀌었다. 이에 대해서 Intel® 64 and IA-32 Architectures Optimization Reference Manual: Volume 1
에서는, 다음과 같은 자료를 제공해준다.

여기서 22-bit와 11-bit항목은 각 항목을 24-bit accurate 데이터로 처리하는 것에 비해 얼마나 throughput이 나오는지인데, 재밌게도 몇몇 예시 operation의 경우 24-bit accurate 데이터보다 22-bit accurate 데이터가 더 throughput이 낮다. 이에 대해선 DIVPS / SQRTPS 등의 명령어셋이 레이턴시가 더 낮기 때문에 반복적인 근사작업을 하는 것 보다 더 빠른 결과를 낸다는 설명이 주어졌다.

결과적으로 24비트 reciprocal of square root의 선택지는 square root 이후 역수를 구하는 방식이 권장 사항이 된다. 이에 대해선 맨 처음 언급한 블로그 글에서 실험 결과가 있는데, 근사치를 허용하는 컴파일러의 옵션을 주지 않는 이상 일반적으로 근사치를 사용하지 않는 것 같다. 이 실험 결과에선 dedicated sqaure root instruction이 없는 한 이 fast inverse square root method가 아직 괜찮다고 결론 내린것 같지만, 아마 그런 환경이 엄청 흔하진 않을 것 같고, 또 이 정도의 최적화를 요구하는 환경이 많지는 않을 것으로 보인다.
결과적으로 modern computing 환경에서는 reciprocal square root는 24-bit accurate하며, 그 속도도 충분히 빠르다고 볼 수 있을 것 같다. 또한 이 빠른 속도의 근원은 sqrt만을 위한 dedicated instruction이 되는 듯 싶다.